Hydraulic Motion vs Electric Motion – A Look At The Past

Source: Wikipedia
Over the past ten to fifteen years, there has been much fanfare and “salesmanship” information provided about electric motion platforms attributes. Very little, however, has been said about the advantages of classic hydraulic systems. The following is intended to expose the myths of each system and put them on an equal comparison basis. It should be noted that of the various motion platform systems available in the market place, each, may have application advantages due to the characteristic of a particular design. Hence, the following analysis and comments are intended for applications where it is necessary to “lift and hold” payloads for extended periods of time as well as accelerating and decelerating that payload while being held in such an elevated condition. Of primary concern are motion platform systems designed primarily for flight simulation and similar applications.
Promoters of electrical powered motion platform systems have repeatedly stated that electrical systems consume less electrical power. Let’s see if this is true by considering the requirements of a specific example. For simplicity, let us assume an example where it is necessary to lift and hold a 20,000 lb payload for long periods of time. Note: this is a common condition for flight simulators and similar applications where accelerating and decelerating dynamics are small but large excursions of the platform are important. Such applications typically use six (6) linear actuators in a hexapod arrangement. As a matter of historic note: the LINK company started building such systems in the late 1940’s, into the 50’s with more than 220 units by the 60’s and 70’s.
The following example is typical of the above referenced conditions, assuming the following typical “Flight Simulator” level conditions:
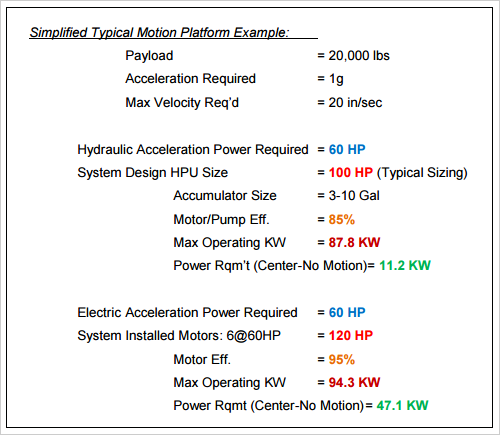
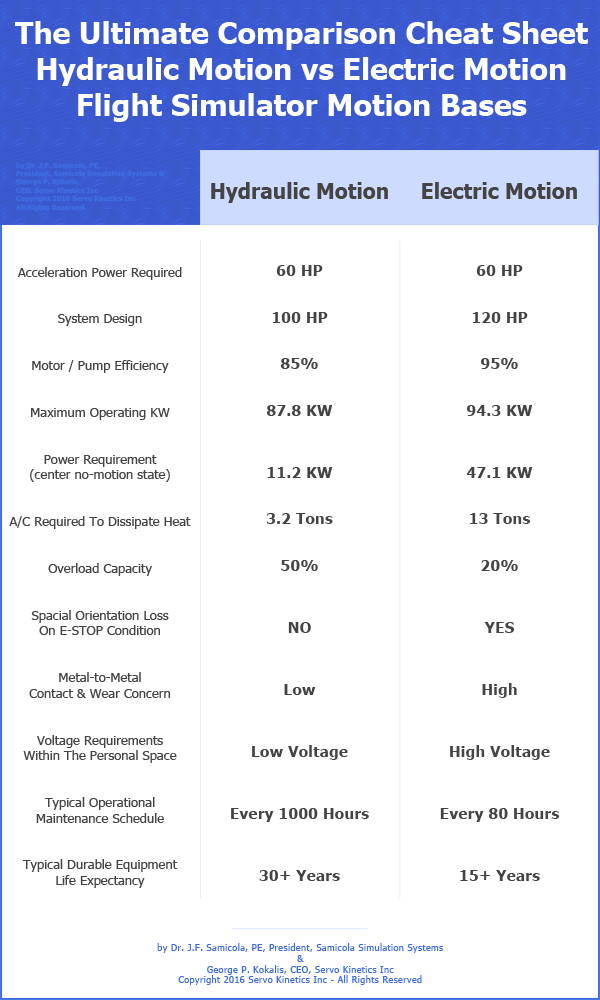
As you can see from this very simple example, the installed power requirement is 20% more for an electric motion platform system, and very importantly, consumption is greater. The most telling issue is when the motion platform is operational at mid stroke position, with no motion being commanded. In this case the hydraulic valves simply close and the HPU’s swash plate throttles back allowing the HPU motor/pump to spin at a very low energy consumption rate. The electric unit, on the other hand, must continue consuming energy equal to the entire weight of the payload, and, heating up. Also, in this case the hydraulic system generates very little heat (approximately 3.2 tons of air-conditioning required to dissipate the heat generated) while the electric unit generates considerable heat (approximately 13 tons of air-conditioning required) that must be rejected. This “heat rejection” cost is almost never mentioned by those promoting electrical systems, however it is critical because in electrical systems, this heat is rejected “in the space” that the motion platform is located; typically in the “people” space. Hydraulic systems however, reject the much smaller amount of heat, typically in a remote mechanical room space. This is not a minor concern, since greater air flow and cooling are required in the “people” space that results in a more “uncomfortable” inhabited space. The bottom line is that electrical system utilized in “motion platform” applications consume significantly more energy than hydraulic systems.
By: J.F. Samicola and G.P. Kokalis